Question
When should I use Setpoint Response mode?
Answer
When a system is scanned across temperature, fastest time to temperature is often desired. For example, scanning a laser in temperature to change the center wavelength allows laser diode manufacturers to characterize the laser quickly.
Wavelength ran a series of tests with IntelliTune® PID control optimization to determine mode response of a tuned system. Setpoint Response mode calculates PID coefficients to drive the system fastest to the first crossing of the setpoint. Disturbance Rejection mode PID coefficients force less overshoot, and the system achieves stable temperature more quickly.
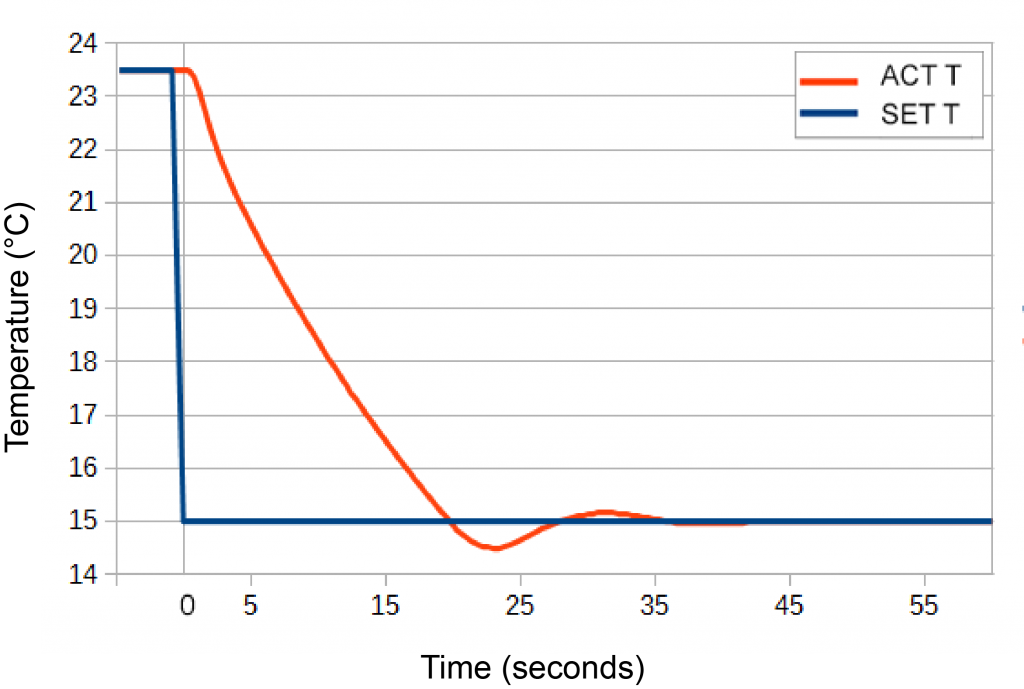 |
| Figure 1. | Tuned, 39.0 seconds to stable temperature |
| First crossing of setpoint: 19.9 seconds | |
| P=14.081; I=1.408; D=1.594 | |
| Setpoint Response |
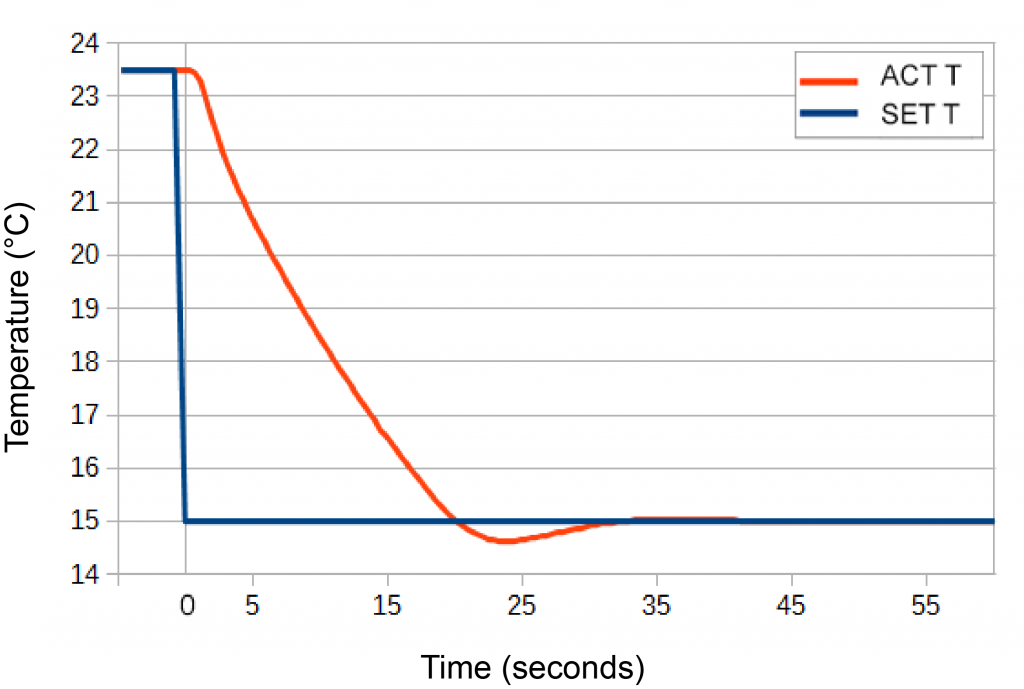 |
| Figure 2. | Tuned, 32.0 seconds to stable temperature |
| First crossing of setpoint: 20.9 seconds | |
| P=22.295; I=0.929; D=2.120 | |
| Disturbance Rejection |
In this example, first crossing times varied by 1 second between modes. A larger load will experience greater variation. When running multiple characterizations over a day, the cumulative time can become substantial.
To read the full report on IntelliTune, click here.
