Question
When should I use Disturbance Rejection mode with the TC LAB Series instruments?
Answer
Use of Disturbance Rejection is recommended when keeping the load at temperature (within tolerance) is the most important parameter.
When a temperature controlled system includes a variable active load (like a pulsing laser diode) or experiences ambient temperature fluctuations (like an opening and closing door), keeping the system at stable temperature can be challenging. We compared the response of Disturbance Rejection and Setpoint Response modes.
To simulate how the system responds to temperature disturbances (e.g. active heating of a pulsing laser, ambient temperature fluctuations), we introduced freeze spray to cool the coldplate where the thermistor is embedded. We dropped the actual thermistor temperature about a degree and measured how quickly the temperature returned to the setpoint (± tolerance). The absolute times vary with the lowest temperature reached, but the data demonstrated the impact of a disturbance and the system response. We measured the time to return to temperature from the lowest temperature to when the controller maintained load temperature at 23.5°C ± 0.05°C.
* Caption details data for this disturbance.
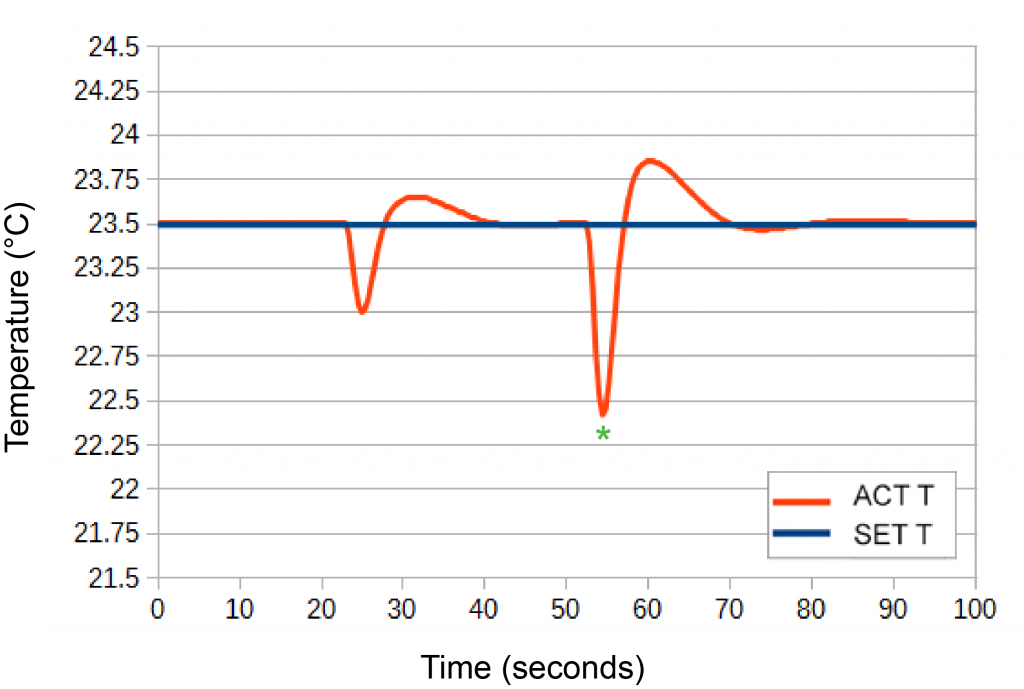 |
| Figure 1. | Tuned, 14.3 second recovery |
| First crossing of setpoint: 2.8 seconds | |
| P=33.352; I=1.390; D=3.172 | |
| Lowest Temp: 22.42°C | |
| Disturbance Rejection |
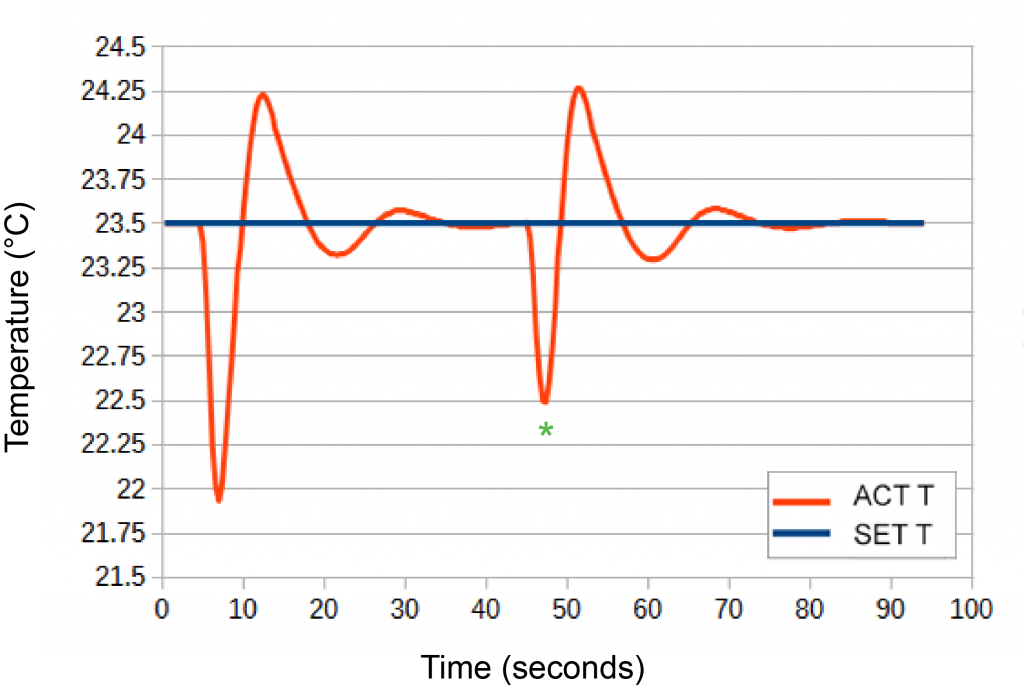 |
| Figure 2. | Tuned, 23.8 second recovery |
| First crossing of setpoint: 2.24 seconds | |
| P=21.064; I=2.107; D=2.385 | |
| Lowest Temp: 22.49°C | |
| Setpoint Response |
The fastest return time to temperature was Disturbance Rejection mode with all PID terms used (Figure 1). The overshoot in Setpoint Response mode (Figure 2) is significantly larger and multiple overshoots are required before the system stays within tolerance. The overshoot and recovery time varies with minimum temperature reached.
To read the full report on IntelliTune®, click here.
